1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
72
73
74
75
76
77
78
79
80
81
82
83
84
85
86
87
88
89
90
91
92
93
94
95
96
97
98
99
100
101
102
103
104
105
106
107
108
109
110
111
112
113
114
115
116
117
118
119
120
121
122
123
124
125
126
| #include "driver/ledc.h"
#include "freertos/FreeRTOS.h"
#include "freertos/task.h"
#define LED_RED_CH LEDC_CHANNEL_0
#define LED_GREEN_CH LEDC_CHANNEL_1
#define LED_BLUE_CH LEDC_CHANNEL_2
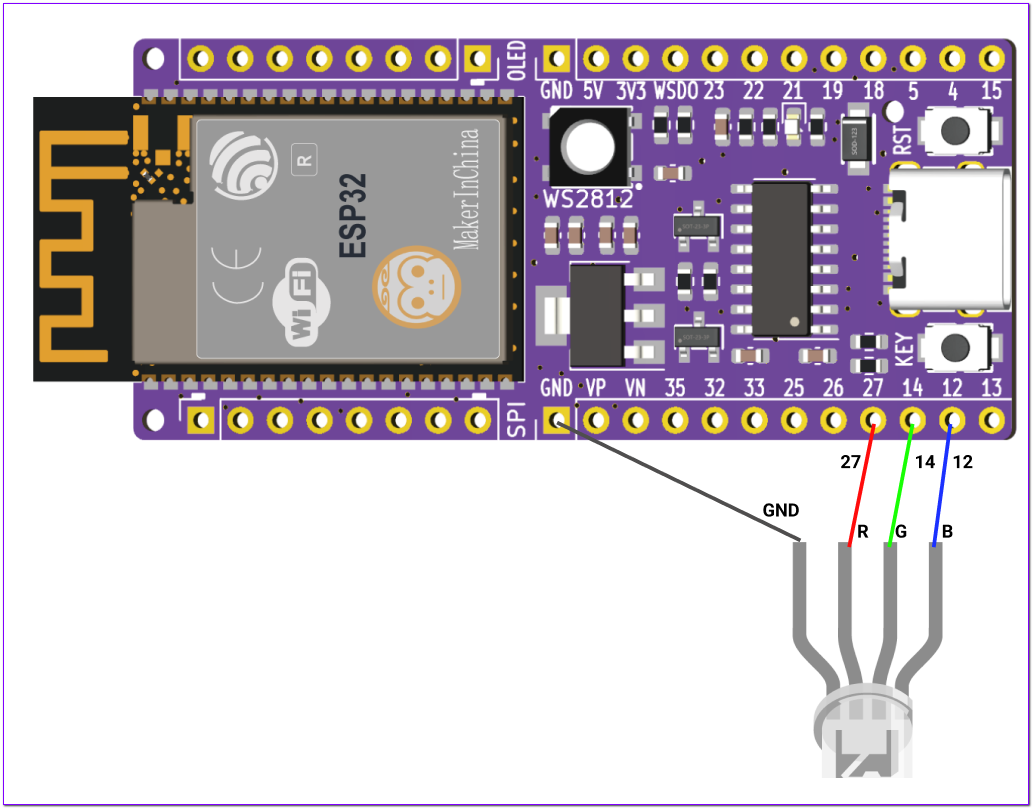
#define LED_RED_PIN 27
#define LED_GREEN_PIN 14
#define LED_BLUE_PIN 12
void ledc_init()
{
ledc_timer_config_t ledc_timer = {
.speed_mode = LEDC_LOW_SPEED_MODE,
.timer_num = LEDC_TIMER_0,
.duty_resolution = LEDC_TIMER_13_BIT,
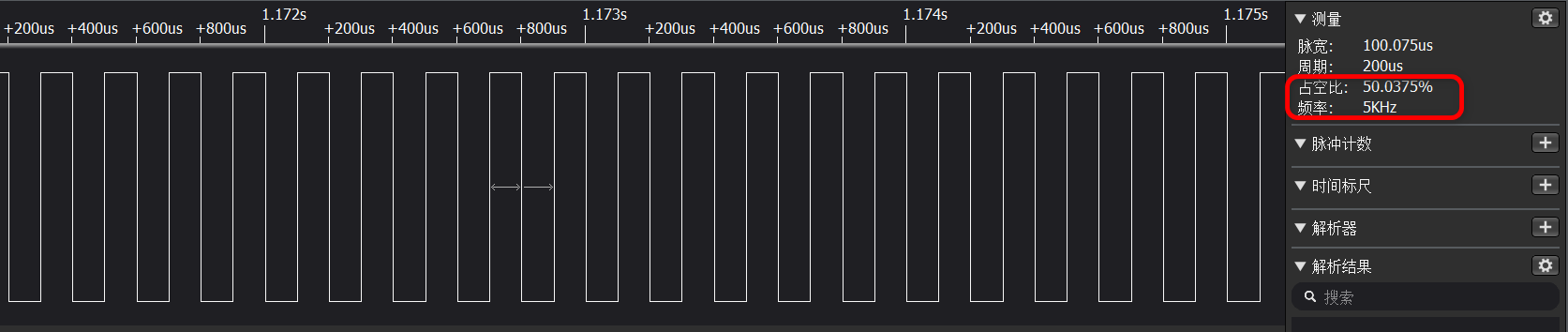
.freq_hz = 5000,
.clk_cfg = LEDC_AUTO_CLK
};
ESP_ERROR_CHECK(ledc_timer_config(&ledc_timer));
ledc_channel_config_t ledc_red_chan = {
.speed_mode = LEDC_LOW_SPEED_MODE,
.channel = LED_RED_CH,
.timer_sel = LEDC_TIMER_0,
.intr_type = LEDC_INTR_DISABLE,
.gpio_num = LED_RED_PIN,
.duty = 0,
.hpoint = 0
};
ESP_ERROR_CHECK(ledc_channel_config(&ledc_red_chan));
ledc_channel_config_t ledc_green_chan = {
.speed_mode = LEDC_LOW_SPEED_MODE,
.channel = LED_GREEN_CH,
.timer_sel = LEDC_TIMER_0,
.intr_type = LEDC_INTR_DISABLE,
.gpio_num = LED_GREEN_PIN,
.duty = 0,
.hpoint = 0
};
ESP_ERROR_CHECK(ledc_channel_config(&ledc_green_chan));
ledc_channel_config_t ledc_blue_chan = {
.speed_mode = LEDC_LOW_SPEED_MODE,
.channel = LED_BLUE_CH,
.timer_sel = LEDC_TIMER_0,
.intr_type = LEDC_INTR_DISABLE,
.gpio_num = LED_BLUE_PIN,
.duty = 0,
.hpoint = 0
};
ESP_ERROR_CHECK(ledc_channel_config(&ledc_blue_chan));
ledc_fade_func_install(0);
}
void app_main(void)
{
ledc_init();
while(1){
for(int i=0; i<3; i++){
ledc_set_duty_and_update(LEDC_LOW_SPEED_MODE,LED_RED_CH,8191,0);
vTaskDelay(400/portTICK_PERIOD_MS);
ledc_set_duty_and_update(LEDC_LOW_SPEED_MODE,LED_RED_CH,0,0);
vTaskDelay(400/portTICK_PERIOD_MS);
}
for(int i=0; i<3; i++){
ledc_set_duty_and_update(LEDC_LOW_SPEED_MODE,LED_GREEN_CH,8191,0);
vTaskDelay(400/portTICK_PERIOD_MS);
ledc_set_duty_and_update(LEDC_LOW_SPEED_MODE,LED_GREEN_CH,0,0);
vTaskDelay(400/portTICK_PERIOD_MS);
}
for(int i=0; i<3; i++){
ledc_set_duty_and_update(LEDC_LOW_SPEED_MODE,LED_BLUE_CH,8191,0);
vTaskDelay(400/portTICK_PERIOD_MS);
ledc_set_duty_and_update(LEDC_LOW_SPEED_MODE,LED_BLUE_CH,0,0);
vTaskDelay(400/portTICK_PERIOD_MS);
}
ledc_set_fade_time_and_start(LEDC_LOW_SPEED_MODE,LED_RED_CH,8191,3000,LEDC_FADE_WAIT_DONE);
ledc_set_fade_time_and_start(LEDC_LOW_SPEED_MODE,LED_RED_CH,0,3000,LEDC_FADE_WAIT_DONE);
ledc_set_fade_time_and_start(LEDC_LOW_SPEED_MODE,LED_GREEN_CH,8191,3000,LEDC_FADE_WAIT_DONE);
ledc_set_fade_time_and_start(LEDC_LOW_SPEED_MODE,LED_GREEN_CH,0,3000,LEDC_FADE_WAIT_DONE);
ledc_set_fade_time_and_start(LEDC_LOW_SPEED_MODE,LED_BLUE_CH,8191,3000,LEDC_FADE_WAIT_DONE);
ledc_set_fade_time_and_start(LEDC_LOW_SPEED_MODE,LED_BLUE_CH,0,3000,LEDC_FADE_WAIT_DONE);
ledc_set_duty_and_update(LEDC_LOW_SPEED_MODE,LED_RED_CH,8191,0);
ledc_set_duty_and_update(LEDC_LOW_SPEED_MODE,LED_GREEN_CH,8191,0);
ledc_set_duty_and_update(LEDC_LOW_SPEED_MODE,LED_BLUE_CH,0,0);
vTaskDelay(2000/portTICK_PERIOD_MS);
ledc_set_duty_and_update(LEDC_LOW_SPEED_MODE,LED_RED_CH,4095,0);
ledc_set_duty_and_update(LEDC_LOW_SPEED_MODE,LED_GREEN_CH,4095,0);
ledc_set_duty_and_update(LEDC_LOW_SPEED_MODE,LED_BLUE_CH,0,0);
vTaskDelay(2000/portTICK_PERIOD_MS);
ledc_set_duty_and_update(LEDC_LOW_SPEED_MODE,LED_RED_CH,100,0);
ledc_set_duty_and_update(LEDC_LOW_SPEED_MODE,LED_GREEN_CH,100,0);
ledc_set_duty_and_update(LEDC_LOW_SPEED_MODE,LED_BLUE_CH,0,0);
vTaskDelay(2000/portTICK_PERIOD_MS);
ledc_stop(LEDC_LOW_SPEED_MODE,LED_RED_CH,0);
ledc_stop(LEDC_LOW_SPEED_MODE,LED_GREEN_CH,0);
ledc_stop(LEDC_LOW_SPEED_MODE,LED_BLUE_CH,0);
vTaskDelay(1000/portTICK_PERIOD_MS);
}
}
|